
QDRIVE TECH
PRECISION DRIVE · MOTION CONTROL
方案优势
WHY QGIMBAL
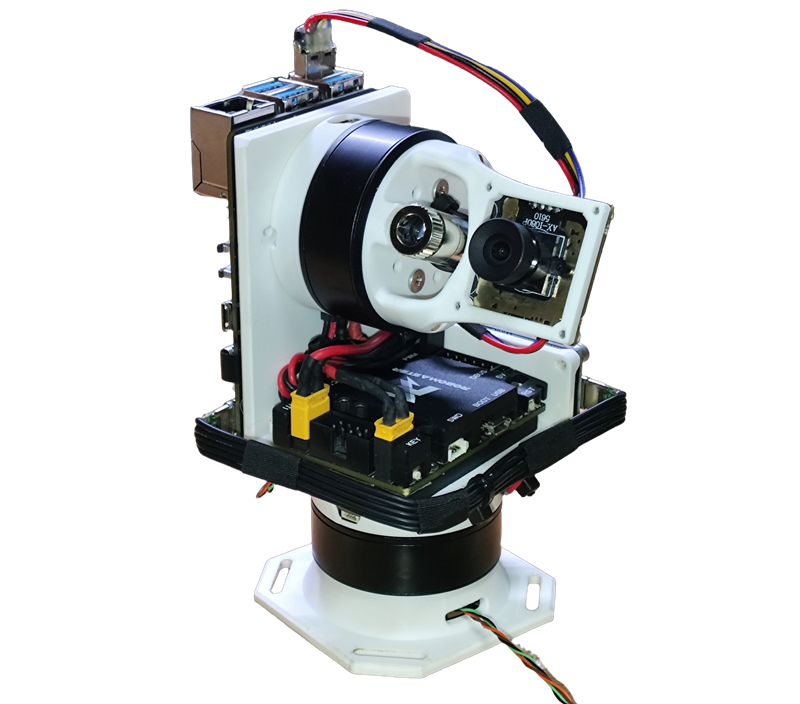
双轴姿态增稳
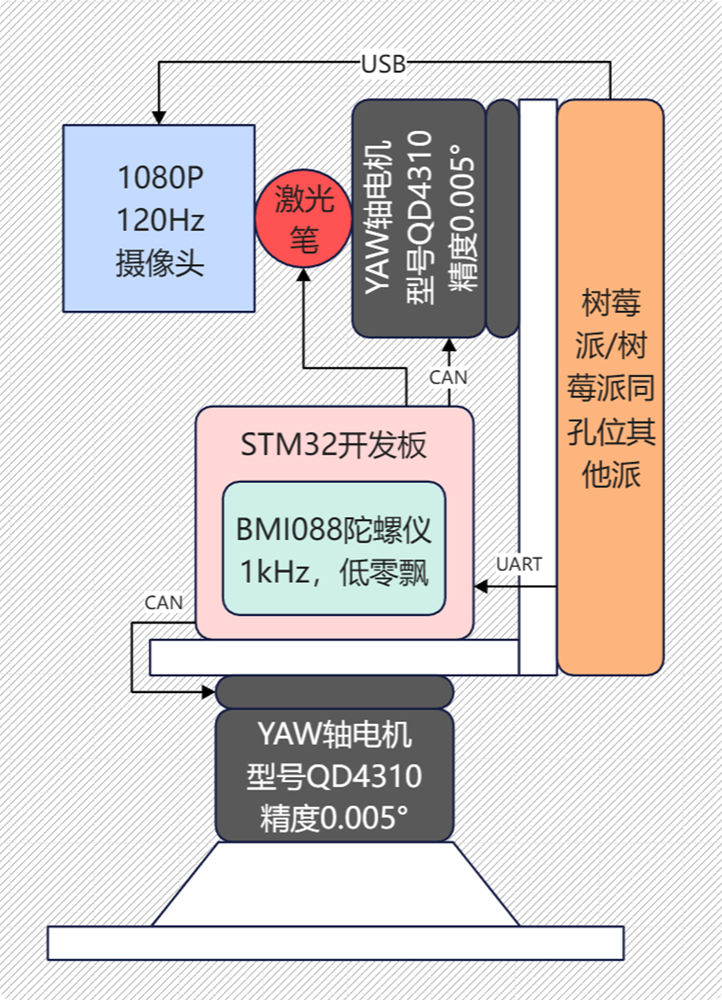
集成 6 轴 IMU 陀螺仪闭环控制,实现俯仰与航向双轴增稳,有效消除外部振动与抖动
智能视觉跟踪
可搭载高帧率摄像头,配合视觉算法实现目标识别与自动跟踪功能
激光精准指向
可集成激光发射模块,适用于测距、标记与精准指向等应用
高精度控制
基于 QD4310 的 15 位编码器与 FOC 矢量控制,0.01° 控制精度,3 米开外可精准绘制波形
毫秒级响应
电流环、速度环快速收敛,毫秒级动态响应,满足高速跟踪与实时增稳场景
串口控制 · 灵活接入
通过 UART 即可控制云台,Linux 开发板、PC 电脑、单片机均可轻松接入
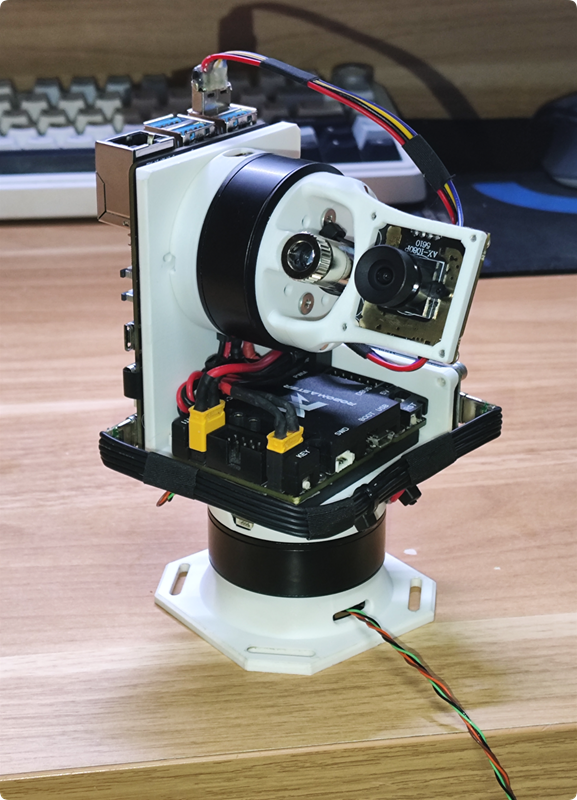
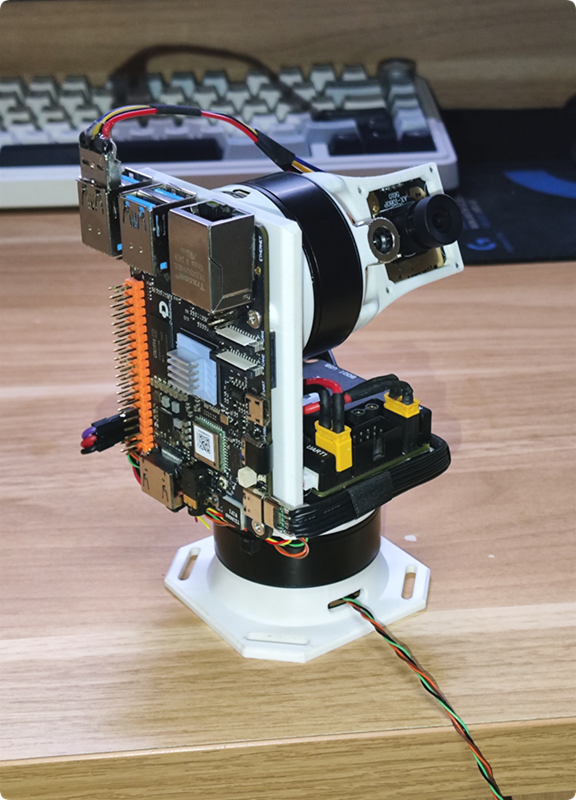
产品细节
PRODUCT GALLERY
演示视频
DEMO VIDEO
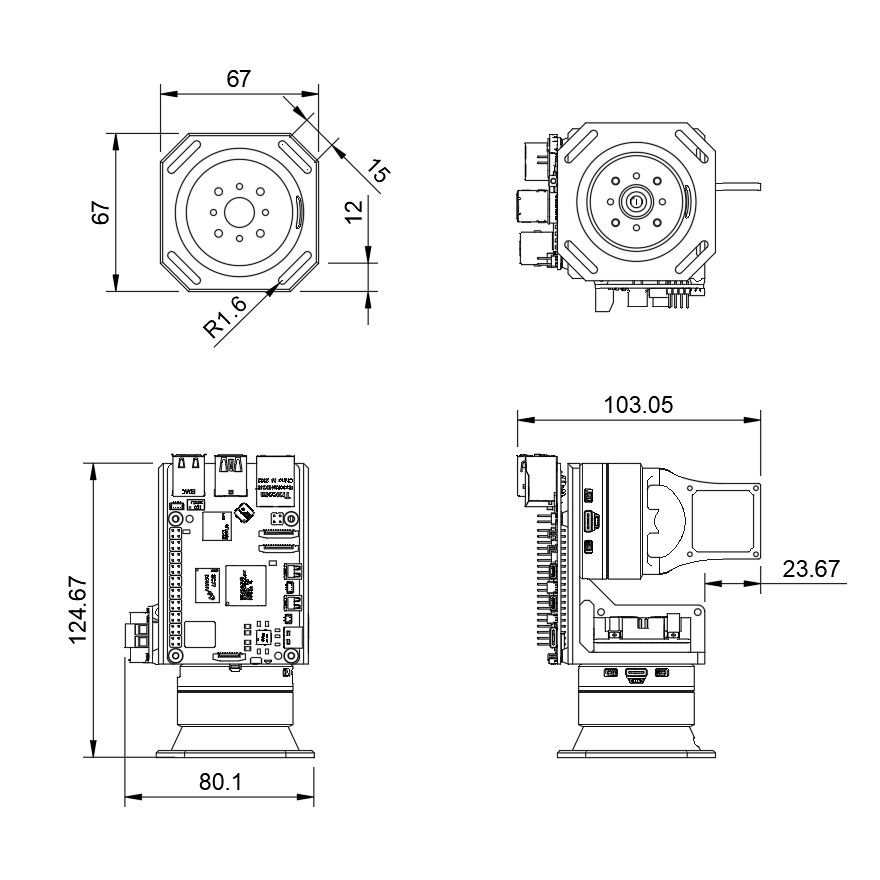
工程图纸
ENGINEERING DRAWINGS
关键参数
SPECIFICATIONS
资料下载
DOWNLOADS
网页上位机
通过浏览器连接 USB 串口,使用 Shell 终端与图形面板完成参数读取、写入与控制相关操作。(推荐 Chrome / Edge)
第三方方案
THIRD-PARTY SOLUTIONS
免责声明:第三方方案由外部开发者或社区提供,仅供参考与二次开发评估。相关内容、代码、视频、文档及外部链接不代表 QDrive Tech 的官方承诺;使用过程中产生的兼容性问题、功能异常、数据损失、设备损坏或其他风险,由使用者自行判断并承担责任。